
Robotic arm-assisted knee replacement is an alternative to the traditional hip replacement surgery. During this state-of-the-art procedure, the surgeon uses the robotic arm technology and its specialised tools to replace the worn-out or damaged parts of hip joint with artificial implants. This surgery of Total Hip Replacement (TKR) is generally for advanced arthritis affecting the hip joint.
In a robotic arm-assisted joint replacement, the surgery it is not performed by a Robot!
In fact, it is the Orthopaedic Surgeon who performs the surgery and controls it, as per the robotic software inputs. The robotic arm helps the surgeon in performing the surgery and placing the hip replacement implants with greater precision as compared to the traditional techniques.
Just like the GPS that helps us in finding our destination, the robotic arm helps the surgeon, to pre-operatively map out precise implant placements as per the patient’s hip anatomy. This planning happens even before the actual bone cuts are made.
The surgeon can now prepare the bones to the exact pre-defined specifications and accurately place the selected implants. This enables good range of hip movement, joint stability, correction of hip deformity and satisfactory limb alignment. Such patient’s hip feels normal and their joint functions well for a very long time.
Robotic arm-assisted total hip replacement uses different imaging techniques to create a virtual 3D model of the patient’s native hip anatomy. This model reconstruction can be done either by using pre-operative CT scans or using an intra-operative arm based on infra-red technology with image guiding software systems.
The patient specific 3D model is then used pre-operatively or intra-operatively to select the correct size implants, to calculate the amount of bone resection needed, to gauge the precise position and orientation of the implants to get maximum bone coverage and the most optimal fit.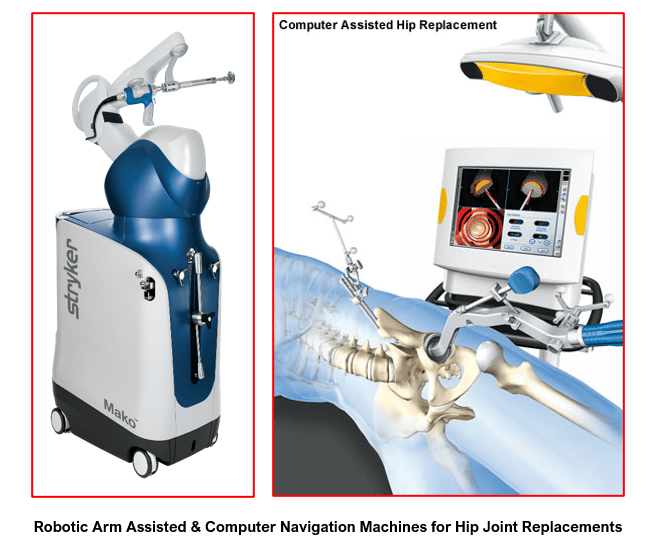
During the surgery, the surgeon places two pins each in the acetabulum and the upper femur. Special tracking probes (arrays) are attached to these pins. There is a computer console with an arm fitted with an infra-red device that communicates with the tracking probes. This entire assembly works on infra-red technology and its computer software helps the surgeon to create a 3D image of the hip joint, by marking and registering all the important landmarks of the acetabulum and the upper femur. These images get displayed on the console screen. At the time of the surgical procedure, the entire console is covered with sterile covers that allow the surgeons to touch it and navigate the touch screen as needed.
A sterile inter-active robotic arm provides the surgeon with real-time visual, audio and tactile resistive feedbacks during surgery. This helps in guiding the surgeon about the intra-operative bone resection, as per the pre-op or intra-op plan, whilst staying within the pre-defined (safe) cutting limits or safety envelope. It also helps the surgeon to navigate the hard-to-see areas comfortably.
The inter-active dynamic referencing also allows the surgeon to check intra-operatively for the following: accurate positioning of acetabular and femoral implants, limb alignment, limb length assessment, hip range of motion and its stability.
Once the surgeon gets all the necessary information from the console, he decides to use the robotic arm that is fitted with a cutting burr or a reamer on a saw handle to start the bony cuts and preparations. Cutting actions of the robotic reamer or burr outside the pre-defined limit is not possible as the saw blade or burr stops working. This avoids both overcutting or undercutting of the bone by the surgeon and helps to preserve native bone stock. It also avoids injuries to the peri-articular soft tissues. The surgeon is able to make fine on-table adjustments to bone resection levels, soft tissue releases and implant position, if necessary.
After the precise bony cuts are made, the fixation techniques of the selected implants with or without bone cement remain the same as in a traditional total hip replacement.
With robotic arm-assisted hip replacements, the surgeon is able to customise hip replacement surgery to patient’s native anatomy leading to a more natural feeling hip with the potential for better long-term function. It is especially useful for patients with specific pre-existing bony deformities or those who have metal hardware from previous surgeries
There is also less blood loss due to less cut bone surfaces getting exposed, improved patient safety, fewer risks of complications, faster recovery and shortened rehabilitation period.
The technological principles and concepts with the computer navigated total hip replacement and the robotic arm-assisted total hip replacement remain the same. The technologies involved create a 3 D model of the patient’s knee either by using pre-operative CT scans or intra-operative inputs by using Infra-red Technology. The hip and its important landmarks get marked whilst creating this virtual model. Specialised software helps in creation of the 3D model.
Based on the 3D model information, the surgeon decides about the amount of bone to be removed, soft tissue releases needed for deformity correction, size of the implants to be used and the best position of implants to give a neutral limb alignment and correct limb length. Accurate implant positioning and sizing make the hip feel like natural and it also has a stable range of motion.
The real difference between navigated and robotic arm-assissted THR, is in the manner in which the bones are prepared at the acetabulum and the upper femur side.
In robotic technique the surgeon uses a robotic arm fitted with a burr or reamer to make the pre-planned bony cuts. The software inputs during this socket bone preparation ensures that there is no undercutting or overcutting of the acetabulum. The orientation of the acetabular cup is assessed in various planes for giving the best fit. The cutting burr stops automatically if the surgeon tries to remove extra bone beyond the pre-determined limits. Due to real time feedback, the surgeon will be warned that he has cut insufficient bone compared to the planned cut and allows him to complete the cut preciously as planned.
In computer navigated replacements, the computer guides the surgeon about the amount of bony preparations needed for best alignment of implants at the acetabulum and the femur. Then the surgeon uses, as pre-planned, a cutting reamer and a saw with attached blade to prepare bone at the acetabulum and the upper femur. But there is always the risk of under or over cutting of the bones unlike the robotics arm-assisted THR. There is no automatic stop to avoid overcutting of the bone or the direction of the bony cuts, though there is visual information displayed on the computer console.
In computer navigated hip replacements, the operating surgeon can use implants of multiple companies with a single console. He selects his chosen company software to do intra-operative planning before making bony cuts.
In robotic arm-assisted hip replacements, the surgeon has to use only that particular company’s implants and does not have the freedom of using implants of other companies.
Robotic Arm-assisted consoles and their proprietary cutting burrs are very expensive equipment compared with the computer navigated console and its infra-red arrays.
Yes, there are few risks and limitations with robotic joint replacement surgery. These are as follows:
- Robotic assisted joint replacement surgical time is longer than traditional joint replacement surgery. Surgeons need specialised training & experience.
- Risk of peri-prosthetic fractures through the pinholes due to pins used for optical tracking arrays. There is possibility of neuro-vascular damage whilst placing the pins and also the risk of pin track infection.
- The computerised system is only as good as the information that is inputted into it and the people who process this information. Needs appropriate training and experience to all staff to improve the workflow for optimal results
- Risk of radiation exposure to the patient, if using a CT based robotic system.
- Costly procedure due to the expensive technology and instruments involved.
- The surgeons are restricted in their choice of implants. They have to use implants of the same company as that of the robotic arm console manufacturer. These machines are not yet meant or designed for use with implants from multiple companies.
- Robotic arm-assisted joint replacement is a new technology for joint replacement implantation. It is still lacking in data about long term survival of implants and their performance, though in the short term the results are encouraging.
- State-of-the-art robotic instruments have the potential to improve outcomes for patients, but that’s not a replacement for good old-fashioned experience. You’ll still want to choose an orthopaedic surgeon who is highly experienced and does high volume of joint replacement surgeries. He should be able to over-ride the robot, if any such need arises.

